Amdroid -A 16 oz Combat Robot
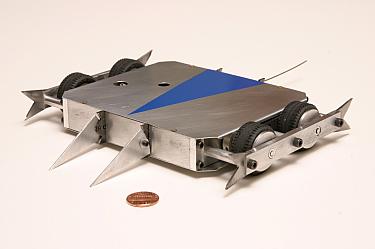
Amdroid - A is an Ant Weight combat robot. It's built to compete in Ant and Sozbot events. Its name comes from the merger of "Amdro" (the popular fire ant killer) and"droid". The "-A" leaves open the possibility for future versions (-B, -C, etc).
Since this was my first 16 oz combat robot I decided to keep it simple. There are no active weapons. My stratagy is to wedge under and push opponents into arena hazards while avoiding my own destruction. It runs equally well upside down. Tilt switches adjust the control system to compensate. To make the bot as strong as possible I built it from 2024 aircraft aluminum.
I did all the machine work in my back yard shop. I have a lathe, vertical mill, band saw, drill press, sheet metal brake, shear and other tools.
| News July 26, 2003 Amdroid-A wins "The Capital Offense". Now has a record of 5 wins, zero losses. |
| July 29, 2003
Back ordered drive motors finally arrive via UPS. The motors I used in Amdroid-A for The Capital Offense event were surplus Escap units with unknown specs. I managed to get 480 rpm out of them at 20 volts. The new motors came from Stock Drive Products. They turn 674 RPM at 12 volts and increase the bots speed by almost 40%. Since the switching power suppy is adjustable, accomodating the 12 volt motor was easy. However, they weigh 1.1 ounces more than the smaller Escaps. After making new lighter wheel assembly spacers the bot is still 0.15 oz overweight. I have ordered some carbon fiber sheet from Robot MarketPlace to build new cover plates. This change should get the weight into the legal range. |
| Aug 1, 2003
Finally got my "boost-on-demand" software working. Basically when the controller sees I have the peddle to the metal and the motor current is low (not pushing) it tells the switching power supply to put out 17 volts instead of 12. The bot will go up to 65 inches per second (5.4 feet/sec) at 17 volts! This is twice the speed it had at Capital Offense. It drops back to 12 volts when the motor current increases due to hitting something. It's still easy to drive due the the speed sensitive steering logic. eg: more speed, less steering sensitivity. |
| Aug 31, 2003
Amdroid-A wins Dragon*Con Robot Micro Battles! Win/loss record is 9/0 . Photos and video here. |
| Nov 15, 2003
Amdroid-A wins Southeastern Ant & Beetle Championship. Win/Loss record is now 14/0 . Photos and video here. |
| Amdroid - A Data Sheet | |
|---|---|
| Size | 7.5 in(W) x 6.5 in(L) x 1.25 in(H) |
| Weight | 15.4 oz |
| Frame | 3/16 in. 2024 aluminum, Cover plates .020 carbon fiber |
| CPU | Atmel AVR 90S8535 |
| Programming Language |
"C" ( AVR-GCC) Developed on SuSE Linux |
| CAD Software | VariCAD running on SuSE Linux |
| Radio | Linx 900 mhz FM modules (in ham band) |
| Controller | Hacked Logitech Wing Man Rumble Pad |
| Data Link | 9600 baud with CRC error checking |
| Power | 4.8 volts from 4 AAA NiMH 800 mAh cells. A switching regulator boosts this to 12 volts for the motors. Boost-on-demand logic raises it to 17 volts for high speed crusing |
| Motors | Two 12 volt 674 RPM gearmotors from Stock Drive Products Part# D33S57M35G0011 |
| Motor driver | L293D driven by microprocessor |
| Motor Current | Software limited to 1 amp max |
| Speed Control | Software generated Pulse Rate Modulaton with Back-EMF feedback. Pulse width is constant at 208 microseconds. |
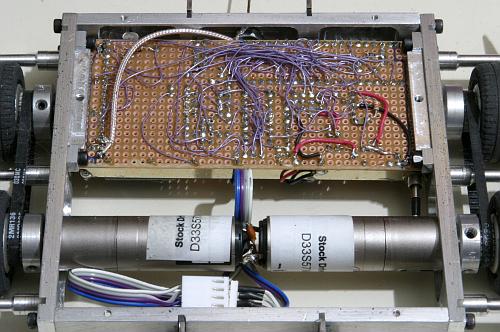
| Drive System | 4WD using pulleys and belts |
| Tires | Four 1.25 inch diameter Lego tires |
| Speed | 40 inches/sec normal, 65 ips with boost enabled |
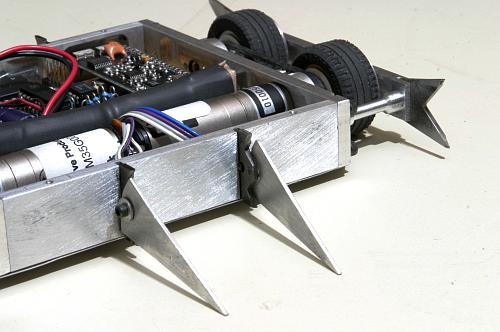
| Weapon | Wedges and hardened tool steel spikes |
Amdroid-A source code and schematics |
|---|
Robot
900 mhz transmitterThis information is supplied in the hope it may be usefull but without any warranty; without even the implied warranty of merchanability or fitness for a particular purpose. |

|
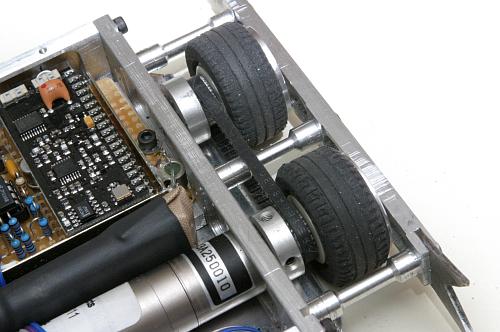
The front wheel and pulley are mounted on the motor shaft. The rear wheel is belt driven. Belts and pulleys are 2mm pitch GT type from Stock Drive Products. Wheels and tires are unmodified lego parts. I machined the axles from 2024 aluminum. |
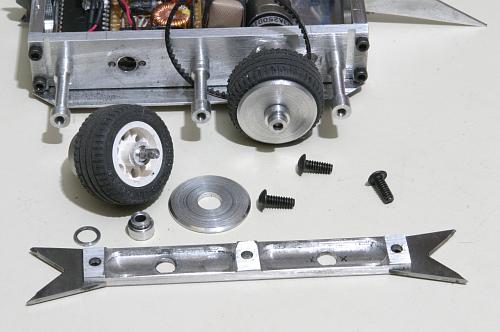
This shows the drive system disassembled. Note the aluminum shields for wheel protection. |
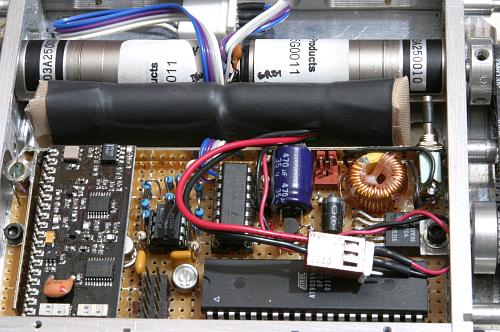
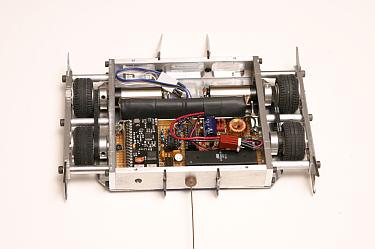
The black surface mount module on the left is the Linx 900 mhz data receiver. The 4 AAA NiMH cells are shrink-wrapped between the motors and perf board. |
The controller is hand wired on Radio Shack single pad per hole perfboard. I used #30 wirewrap wire for signals and some #26 for higher current conductors. |

This is the same controller used with T-Zero and Invertabot. |
Previous page: Thrasher - 16oz Combat Robot
Next page: Invertabot 12# Combat Robot
