T-Zero 12# Combat Robot
June 2002

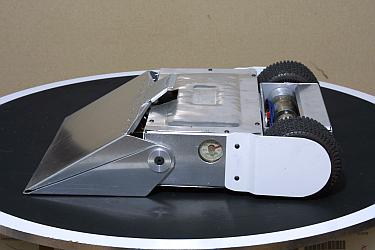
T-Zero is my first combat robot. It's designed to compete in the 12 pound weight class at Dragon*Con this year. It's an invertable "launch bot" with a pneumatic flipper as the main weapon. It also works well as a pure wedge.
The wedge and flipper also function in the inverted position as shown in the photos on the left. The top photo shows the bot upright and the bottom shows it inverted. An internal mercury switch senses the position and reverses the control signals when needed. The driver does not need to compensate.
You may download zipped schematics and C source code for the robot here and the controller/transmitter here. This information is for reference only. It may be incomplete or inaccurate. Please do not ask me to explain how it works or provide additional information.
| T-Zero Data Sheet | |
|---|---|
| Size | 13 in(W) x 16.5 in(L) x 4 in(H) |
| Weight | 11 lbs 15 oz |
| CPU | Atmel AVR 90S8535 |
| Programming Language |
C |
| Radio | Linx 900 mhz FM modules (in ham band) |
| Controller | Hacked Logitech Wing Man Rumble Pad |
| Data Link | 9600 baud with CRC error checking |
| Power | 33 volts from 27 AA NiMh 1800 mAh cells |
| Motors | Two Pittman GM9234S023 24 volt , 127 RPM gear motors |
| Motor driver | Custom circuit using power MOSFETs and microprocessor |
| Motor Current | Software limited to 4 amps max |
| Speed Control | Software generated Pulse Rate Modulaton with Back-EMF feedback. Pulse width is constant. |
| Tires | Two 4 inch diameter RC car tires |
| Speed | 3 feet/sec |
| Pushing Force | 20 lbs (on carpet) |
| Weapon | Pneumatic Flipper powered by 200 PSI CO2 |

The flipper weapon in the full open position.
The flipper is powered by 200 psi CO2 and develops 40 pounds of lift at the tip in milliseconds. It can flip over 12 pound objects and launch lighter ones into the air. The reaction force is transfered to the lower flipper and into the floor. Since the flippers two halves are hinged to each other and the pneumatic cylinder simply forces them apart, it works equally well upright or inverted. The solenoid valve has been modified by machining a new valve body. It has a larger orifice and is lighter than the original.
When the microprocessor receives a FIRE command it pulses the solenoid valve with 33 volts for 60 milliseconds. A return spring in the pneumatic cylinder and a very small bleed hole in the inlet tube allow the flipper to close.
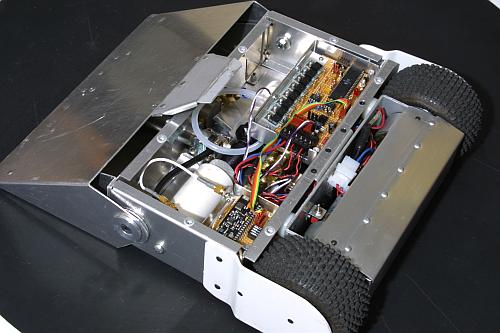
Top view with cover removed
Motor controller (right) and radio receiver (left) visible

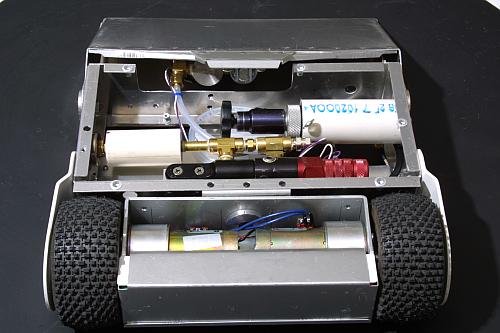
Bottom view, cover removed
The long black and red object is a paint ball CO2 regulator. It reduces the 750 PSI from the BB gun CO2 cartridge to a more manageable 200 PSI. There is also a 250 PSI safety valve in case of regulator failure. The BB gun CO2 cartridge is inside an adapter secured inside the white PVC pipe on the right. T-Zero gets 12 "shots" from a single 12 gram CO2 cartridge.
The pressure gage is on the left attached to a short piece of PVC acting as a buffer tank. This PVC pipe is rated at 375 PSI.
Rear bottom view
Note that the motor assembly pivots on the body to keep the wedge/flipper flat on the floor.

Batteries and motors
27 AA NiMH cells power 2 Pittman 24 volt gear motors with 33 volts. To save 4 oz of weight I replaced the steel gear cases with aluminum.
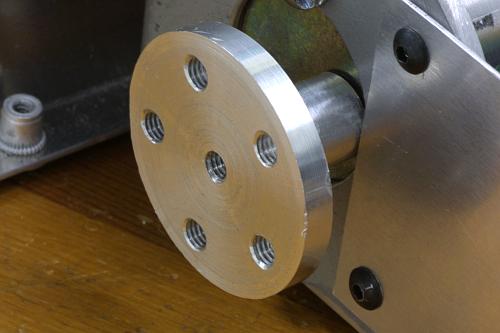
Custom wheel mount

Hacked game controller
Microprocessor and 900 MHZ transmitter inside box.
Previous page: Invertabot Construction Log
Next page: Suckmaster II Vacuum Robot
